-
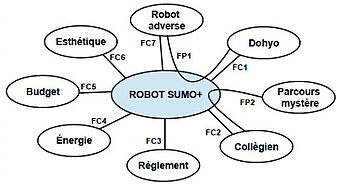
La pieuvre permet de représenter les fonctions de service d'un objet et de leurs relations. Son application sers à déterminer les fonctions de service.

Fonctions de services :
POUSSER le robot adverse hors du dohyo
EFFECTUER le parcours mystère sous pilotage d'un collégien
NE PAS DETERIORER la surface plane
REALISER par des collégiens
RESPECTER le règlement
DISPOSER de sa propre source en énergie
NE PAS D2PASSER le budget
ETRE esthetique
RESISTER aux attaques du robot adverse
-
-
-
Lors de la conception d'un robot, les critères pris en compte sont les suivants: Le type de terrain, La stabilité du robot et la vitesse du robot.
Il existe quatre familles de solutions techniques pour déplacer un robot au sol. Les quatre familles de solutions techniques sont: La famille des roues, la famille des chenilles, la famille des jambes et la famille des pattes.
Parmi ces familles, il peut y avoir des variantes, exemples: Robot a trois roues et a six roues ou des robots a six pattes et a quatre pattes.
Pour garantir la mobilité d'un robot, il doit pouvoir rester stable grâce a sa surface de sustentation au préalable défini par rapport au nombres d'appuis, il faut aussi placer au mieux le centre de gravité au milieu de la surface de sustentation pour pouvoir faire la répartition des masses de composants ou ajouter un contre-poids; et pour finir nous devons positionner verticalement le centre de gravité le plus proche possible du sol pour limiter la hauteur du robot par rapport à sa base pour augmenter la base du robot puis placer les composants les plus lourds le plus bas possible.

Ci-dessus la surface de sustentation est représenter par les pointillés

Voici la représentation de la répartition des masses de composants.
Article rédiger par Théo et Badjian, 3A
-
Il existe 3 grandes familles de capteurs pour les Robots Sumo+. La première, la famille des capteurs ultrasons, la deuxième, les capteurs laser et pour finir, la famille des capteurs infrarouges
Voici leurs principes de fonctionnement:
-Les capteurs ultrasons : L'émetteur envoi un court signal sonore inaudible pour l'oreille, ensuite le récepteur le reçoit et ainsi évite les obstacles.
-Les capteurs laser: Le capteur de ligne(capteur laser) étant orienté vers le sol , la LED émettrice envoi une lumière infrarouge que le sol réfléchit en direction du phototransitor qui capte ainsi la quantité de lumière en retour.Il faut savoir que les couleurs foncé réfléchissent moins facilement la lumière que les couleurs claires. Grace à cette particularité , le capteur va permettre de faire la différence entre zone blanche et une zone noir.
-Capteurs infrarouges : Les capteurs de distance infrarouge utilise le principe de la triangulation du rayon lumineux afin de calculer la distance de l'objet. Suivant la distance de l'objet à détection, l'angle du rayon lumineux( rayon lumineux invisible à l’œil humain) qui se réfléchit sur l'objet est différent. Cette orientation différente du rayon lumineux en retour vers le récepteur par l'intermédiaire de la lentille est mesurée grâce à un détecteur de position interne au capteur.

Théo Yildirim/ Bajian Berthé 3A e4







|
|
|
|